


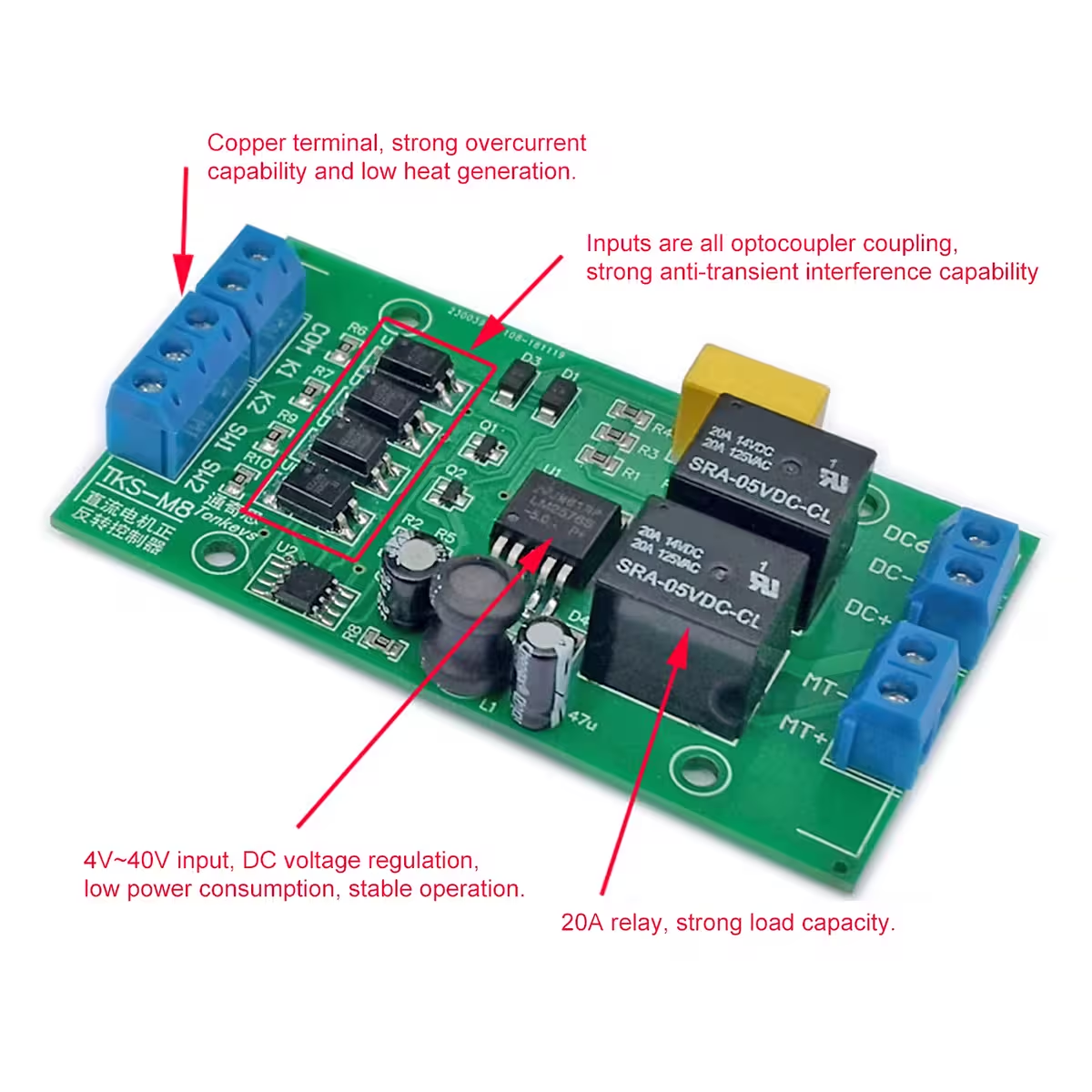
DC regulátor smeru motora – ovládanie pohybu vpred/vzad bez nutnosti externých komponentov
Máte lineárny pohon, reverzný mechanizmus alebo DIY projekt, ktorý vyžaduje presné ovládanie smeru otáčania? Bez špecializovaného modulu by ste sa museli trápiť s relé, tranzistormi a zložitou kabelážou. Tento DC regulátor smeru motora vyrieši všetko v jednom kompaktnom module: stačí pripojiť napájanie, motor a tlačidlá – a do niekoľkých minút môžete začať.
Poznámka: Motor dostáva rovnaké napätie, aké má napájací zdroj. Napätie nie je týmto regulátorom meniteľné.
Prečo si vybrať práve tento model? (Kľúčové výhody):
- Široký rozsah napätia: 4–40 V DC — funguje s LiPo batériami, laboratórnymi zdrojmi alebo priemyselnými napájacími adaptérmi bez nutnosti úprav
- Výstupný prúd až 20 A — bez problémov zvládne motory s vysokými rozbehovými prúdmi, vhodné pre záťaže do cca 80 W
- Dva voliteľné režimy: PO a P1 — vyberte si medzi samočinným udržiavaním (spustenie krátkym impulzom) a jog režimom (aktivácia len počas držania tlačidla) podľa typu aplikácie
- Univerzálne aktívne nízke vstupy (active-low) — priamo pripojíte jednoduché tlačidlá, mechanické spínače typu NO alebo 3-vodičové NPN senzory bez nutnosti ďalších rezistorov či logických členov
- Integrované koncové spínače SW1/SW2 — zabezpečujú automatické zastavenie na konci dráhy a eliminujú riziko mechanického zablokovania alebo preťaženia
- Životnosť >150 000 cyklov — vysoká spoľahlivosť pre každodenné opakované používanie
- Nízka vlastná spotreba: 0,6 W v prevádzke / 0,1 W v pohotovostnom režime — šetrí vašu batériu, keď je systém neaktívny
Detaily a výkon
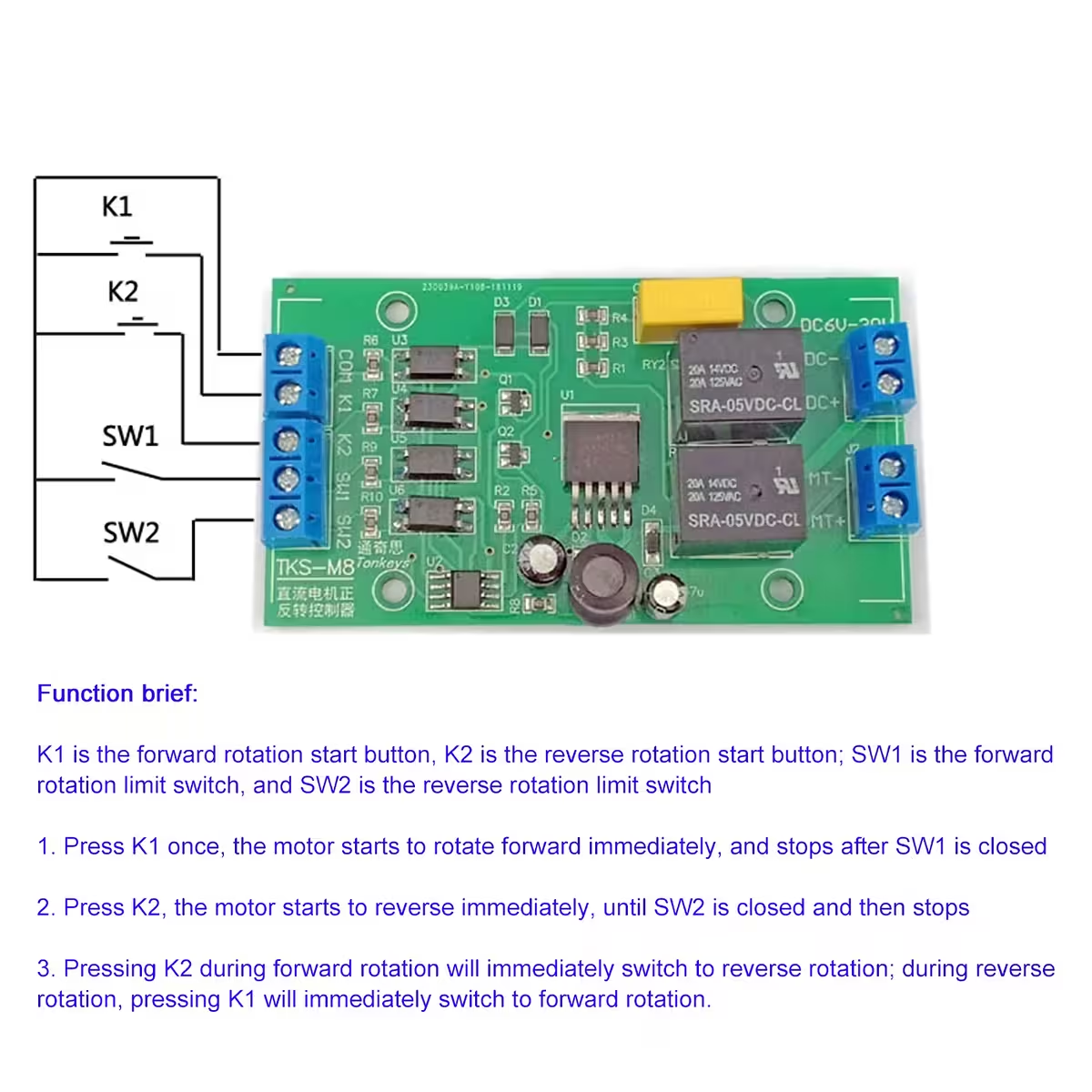
Regulátor využíva architektúru založenú na aktívnych nízkych vstupoch: vstup sa aktivuje, keď napätie na ňom klesne pod 2 V. To znamená, že jednoduché tlačidlá, mechanické koncové spínače NO (normal-open) a NPN-NO 3-vodičové senzory pripojíte priamo bez akýchkoľvek medzistupňov.
Čas odozvy je ≈ 20 ms pre príkazy K1/K2 a ≈ 50 ms pre koncové spínače SW1/SW2 — dostatočne rýchle pre dynamické aplikácie a zároveň dostatočne stabilné, aby sa predišlo falošným aktiváciám.
Pri vyšších napätiach odporúčaný prúd klesá: pri 12 V môžete využiť až 20 A, zatiaľ čo pri 24 V sa odporúča limitovať prúd na cca 10 A pre dlhodobú tepelnú stabilitu. Vždy používajte vhodne dimenzovanú poistku a kabeláž zodpovedajúcu záťaži.
| Parameter | Hodnota / Detail |
|---|---|
| Prevádzkové napätie | DC 4–40 V (odporúčané 6–36 V) |
| Maximálny výstupný prúd | až 20 A (pri 12 V) |
| Odporúčaný výkon motora | do cca 80 W |
| Spotreba modulu (aktívny) | cca 0,6 W |
| Spotreba modulu (standby) | cca 0,1 W |
| Typ vstupného signálu | Active-low (aktívny pri napätí < 2 V) |
| Čas odozvy K1/K2 | ≈ 20 ms |
| Čas odozvy SW1/SW2 | ≈ 50 ms |
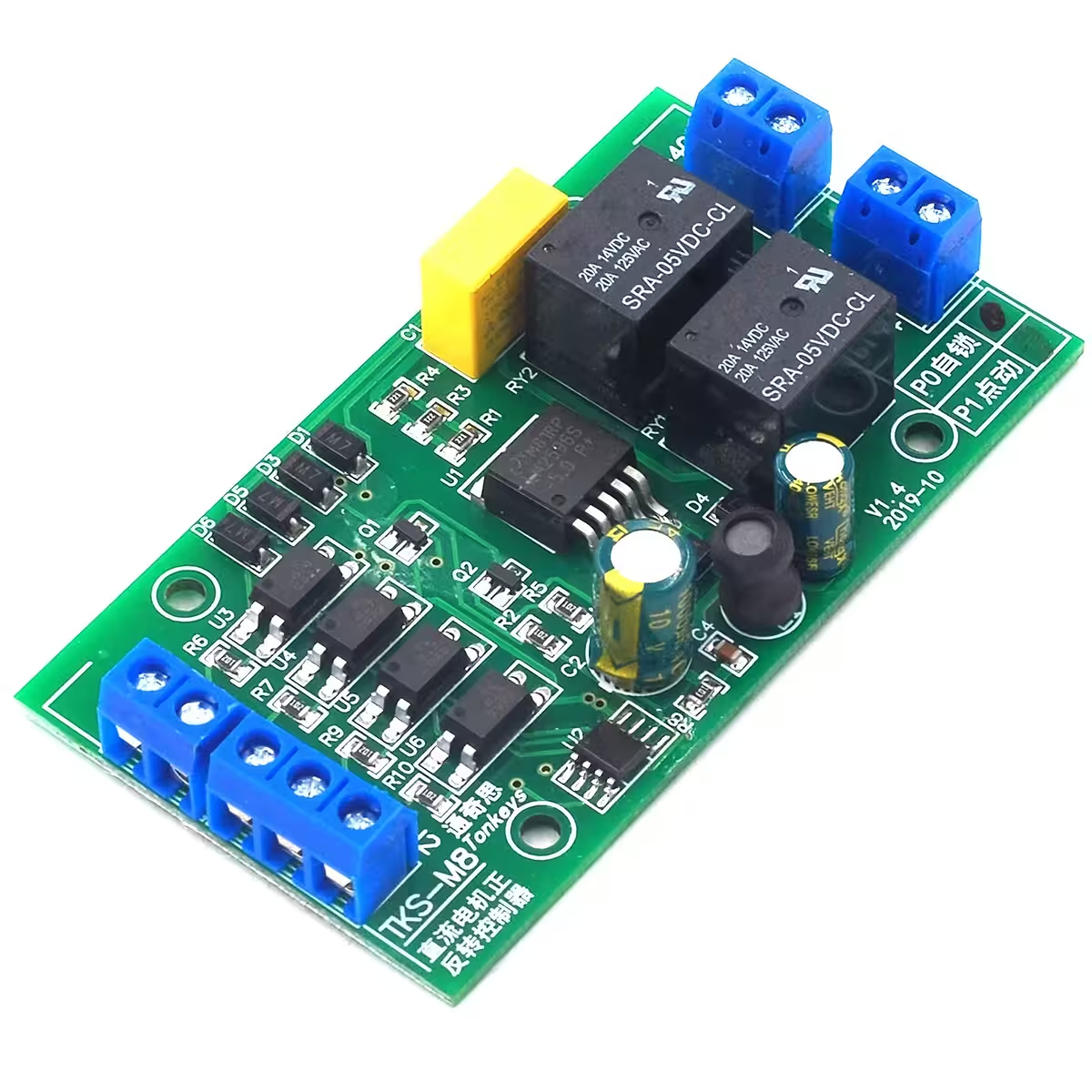
| Prevádzkové režimy | PO (samočinné udržiavanie) / P1 (jog) |
| Životnosť | > 150 000 cyklov |
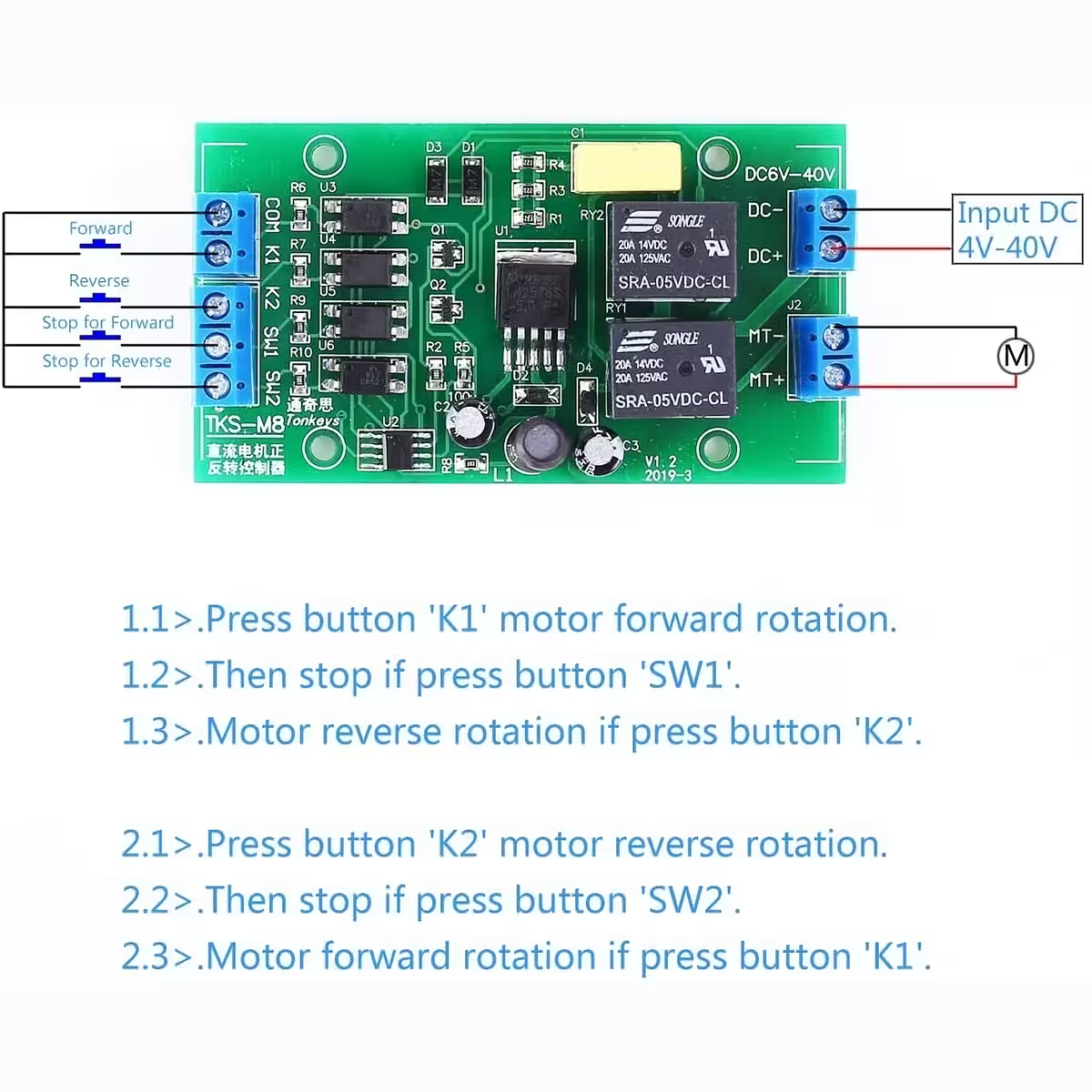
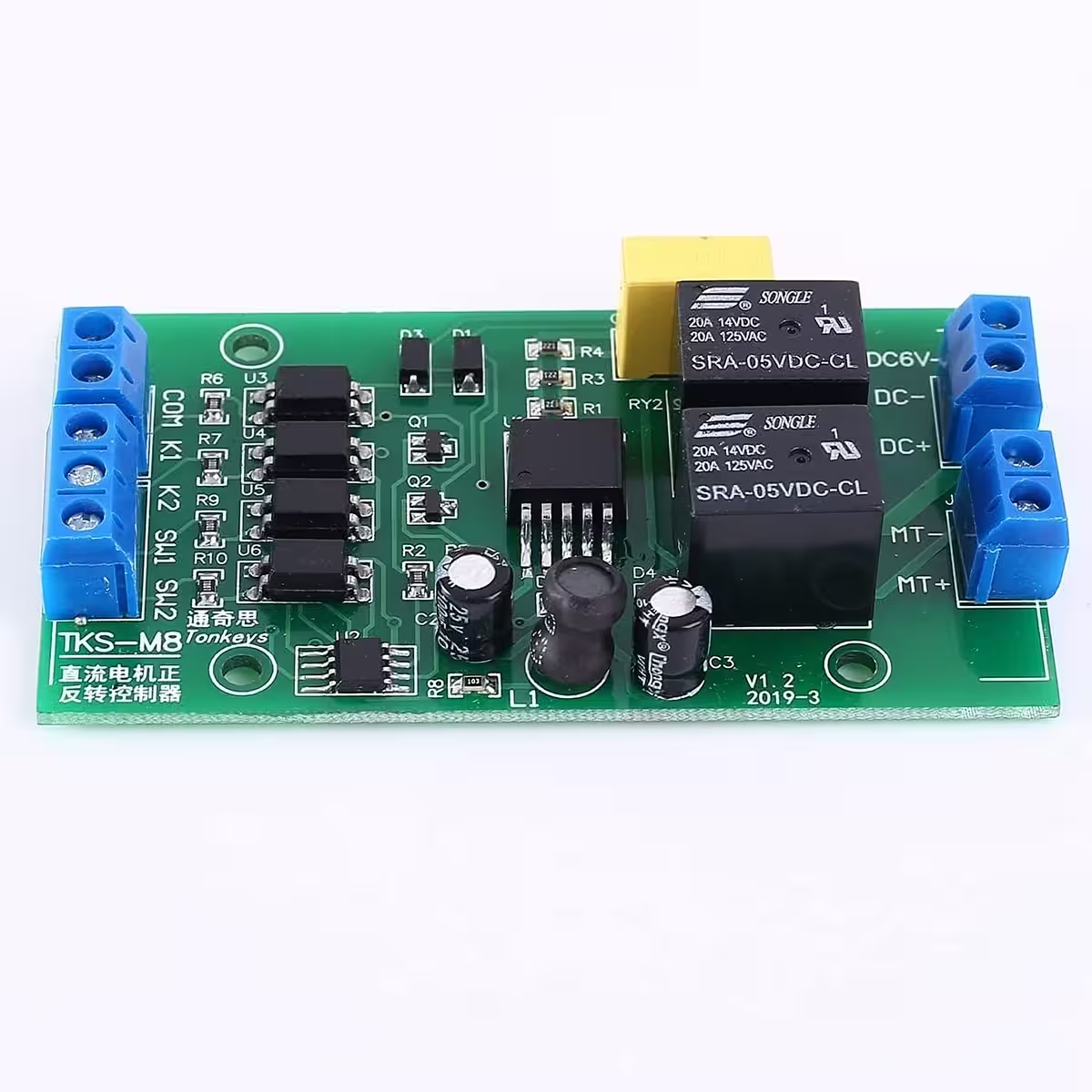
| Vstup K1 | Ovládanie chodu vpred (active-low) |
| Vstup K2 | Ovládanie chodu vzad (active-low) |
| SW1 | Koncový spínač chodu vpred (odporúčaný NO) |
| SW2 | Koncový spínač chodu vzad (odporúčaný NO) |
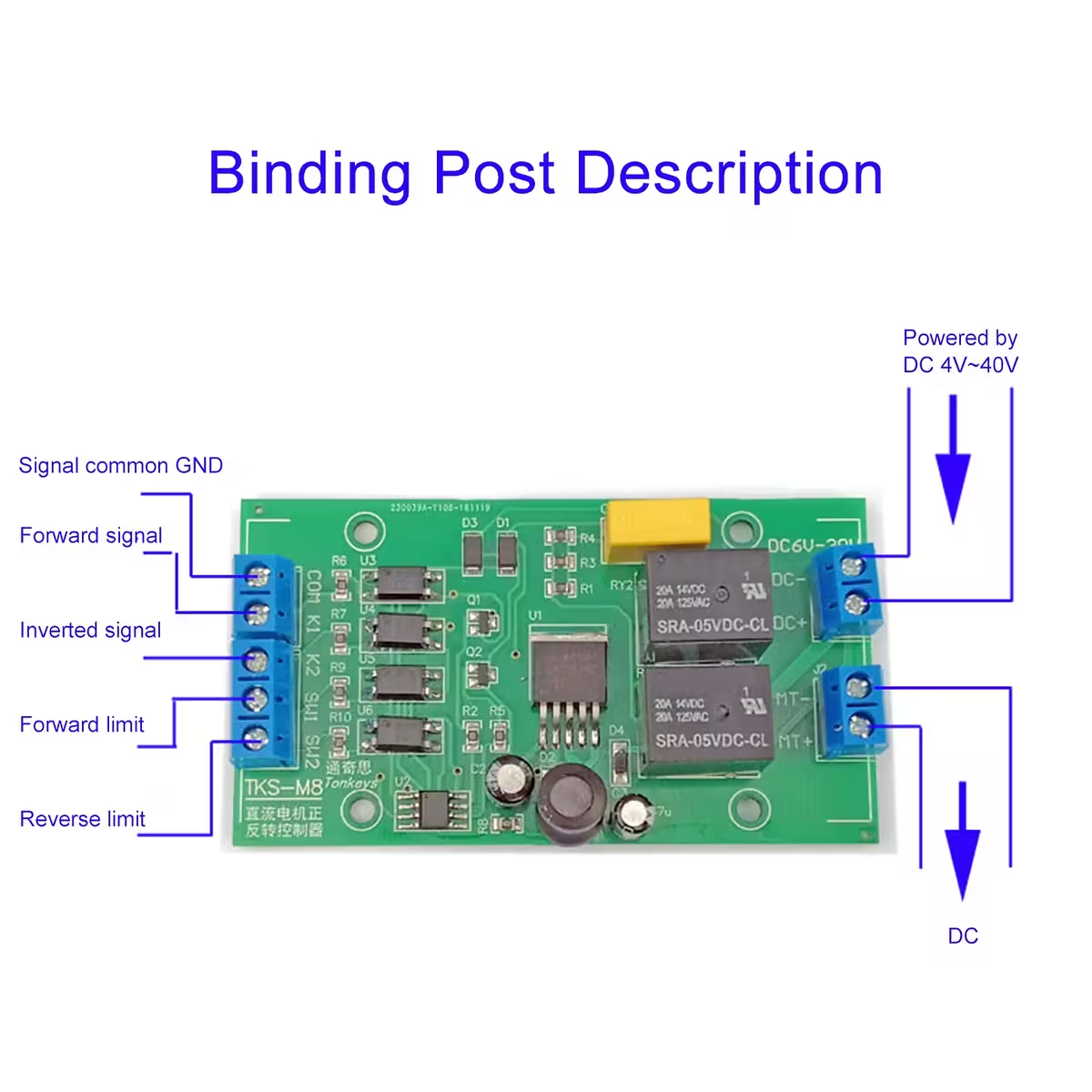
| VIN+ / VIN- | Napájanie modulu DC 4–40 V |
| Motor+ / Motor- | Výstup pre DC motor |
Návod na programovanie a použitie
Režim PO (Samočinné udržiavanie): Krátky impulz na K1 alebo K2 spustí motor. Ten pokračuje v chode samostatne až do aktivácie príslušného koncového spínača alebo prijatia opačného príkazu. Ideálne pre automatizáciu.
Režim P1 (Jog): Motor je aktívny len počas doby, kedy je príkaz K1 alebo K2 držaný v aktívnom stave. Ideálne pre jemné nastavenia a manuálne polohovanie.
- Pripojte napájací zdroj na VIN+ a VIN– (dodržte polaritu).
- Pripojte DC motor na Motor+ a Motor–.
- Zvoľte prevádzkový režim: PO pre samočinné udržiavanie alebo P1 pre jog.
- Pripojte tlačidlá alebo ovládacie signály na K1 (vpred) a K2 (vzad) — vstupy sú typu active-low.
- Voliteľne pripojte mechanické koncové spínače alebo NPN-NO senzory na SW1 a SW2.
- Pre automatický cyklický pohyb A→B→A: pripojte výstupy spínačov NO z pozície A na K1 a z pozície B na K2, pričom SW1/SW2 nechajte nezapojené.
- Pre integráciu s Arduinom: prepojte GND Arduina s GND regulátora, digitálny pin pre smer vpred na K1 a digitálny pin pre smer vzad na K2. Nastavte piny ako OUTPUT a pre aktiváciu zapíšte LOW.
- Skontrolujte rozbehový prúd motora a na napájaciu vetvu umiestnite vhodne dimenzovanú poistku.
Obsah balenia
- 1 × Regulátor smeru DC motora (vpred/vzad), režimy PO/P1
Často kladené otázky
Čo znamená active-low a prečo je to dôležité?
Vstup sa aktivuje, keď napätie na ňom klesne pod 2 V — teda keď je spojený so zemou (GND). Jednoduché tlačidlá, mechanické NO spínače a NPN senzory fungujú presne takto. Nepotrebujete žiadne ďalšie rezistory ani invertujúcu logiku.
Aký je rozdiel medzi režimom PO a režimom P1?
V režime PO krátky impulz na K1 alebo K2 spustí motor a ten beží autonómne až po koncový spínač alebo opačný príkaz — užitočné pre automatizáciu. V režime P1 motor beží len vtedy, keď je príkaz aktívne držaný — vhodné pre presné nastavenia alebo manuálne ovládanie.
Môžem tento regulátor pripojiť priamo k Arduinu?
Áno. Prepojíte GND Arduina s GND regulátora a použijete dva digitálne piny nastavené ako OUTPUT. Keď je pin v stave LOW, príkaz je aktívny. Arduino riadi logiku, regulátor riadi výkon — bez potreby medzistupňov.
Môžem použiť spínače s rozpínacím kontaktom (NC)?
Regulátor je optimalizovaný pre spínače typu NO (spínací kontakt). Kontakty NC by obrátili logiku a mohli by spôsobiť nežiaduce správanie. Pre SW1 a SW2 vždy používajte kontakty typu NO.
Je potrebný chladič pri maximálnom prúde?
Pri prúdoch blížiacich sa k 20 A alebo pri intenzívnych cykloch zabezpečte dostatočné vetranie a sledujte teplotu modulu. Pre trvalé aplikácie pri vysokej záťaži môže malý chladič alebo nútené chladenie výrazne predĺžiť životnosť.
Ako vytvorím automatický cyklický pohyb bez časovača?
Pripojte spínače NO z pozície A na K1 a z pozície B na K2, pričom SW1 a SW2 nechajte nezapojené. Pri dosiahnutí každého konca dráhy spínač automaticky aktivuje príkaz pre opačný smer — motor bude oscilovať nepretržite bez vonkajšieho zásahu.
Prezentačné video
Fotogaléria












Recenzie
Nikto zatiaľ nepridal hodnotenie.